2024-03-17 18:40

![]()

3月17日,在中國電動汽車百人會汽車新質生產(chǎn)力論壇上,元戎啟行CEO周光表示,智能駕駛端到端模型將會成就一位“超級AI司機”,開啟物理世界通用人工智能技術的新紀元。目前,公司已經(jīng)成功將端到端模型適配到量產(chǎn)車上,該批量產(chǎn)車將于今年投入消費者市場。
元戎啟行是國內(nèi)第一家能夠將端到端模型成功上車的人工智能企業(yè)。在當前的國內(nèi)消費市場,智能駕駛系統(tǒng)仍然采用模塊化模型,將感知、預測、規(guī)劃分別為三個獨立的模型。每個模型的技術棧差異較大,處于下游的規(guī)劃模型需要依賴工程師編寫大量代碼去制定行駛規(guī)則。在模塊化的技術架構下,信息的傳遞會出現(xiàn)減損,系統(tǒng)的維護難度大,無法從容應對復雜路況。

而端到端模型則截然不同,該模型將感知、預測、規(guī)劃三個模型融為一體,無需程序員編寫冗長的代碼去制定規(guī)則,而是用海量數(shù)據(jù)去訓練系統(tǒng),賦予機器自主學習、思考和分析的能力。端到端模型不會出現(xiàn)信息傳遞減損,能夠更好地處理復雜的駕駛任務,解決了模塊化模型存在的所有“痛點”。
“智能駕駛信息的傳遞不應該是你畫我猜,而是像人類一樣對所見到的信息作出最直接的反應。模塊化模型是將一個復雜任務分解成多個子任務,逐個解決,這樣的解決問題方式既曲折又容易出錯。而端到端模型則是基于問題的根本,直接尋求最優(yōu)的解決方案。”周光說。
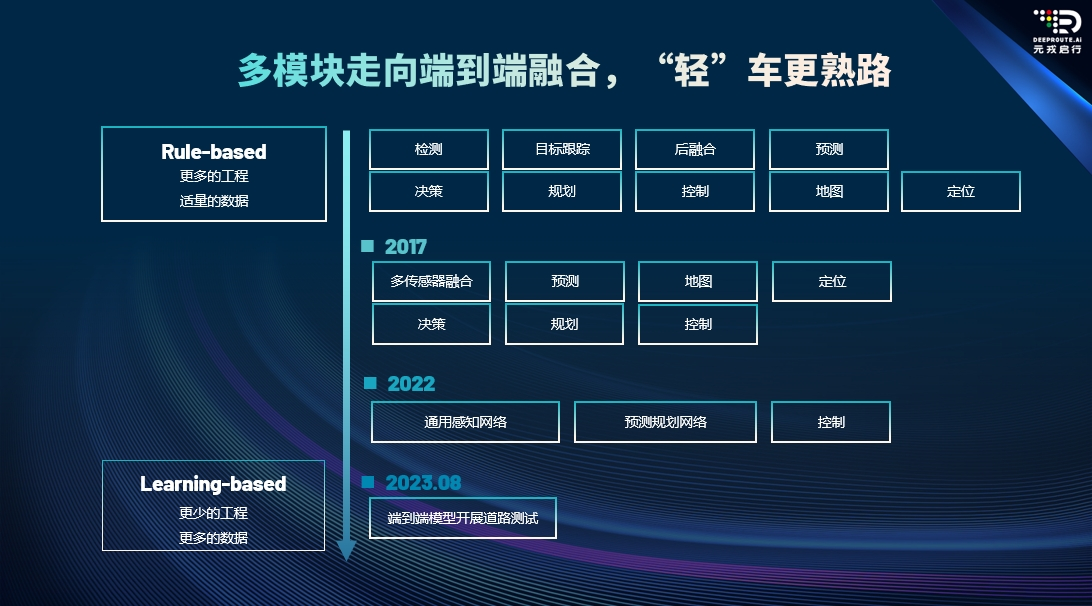
早在2023年8月,元戎啟行就運用端到端模型完成了道路測試。在測試中,端到端模型表現(xiàn)驚艷,能夠賦予智能駕駛汽車“人類智慧”。例如,該車會顧慮后車需求,在停車的狀態(tài)下,“看到”后車打轉向燈,主動禮讓后車右轉。在路況復雜的城中村狹窄路段,搭載端到端模型的車輛行駛流暢,無頓挫感。如果遇到前方有多輛車違停,該車不會呆板地停在前車后方,而是能夠判斷前車的行駛意圖,繞開前車行駛。此外,在視線受阻的路況下,搭載端到端模型的車輛也能根據(jù)以往的訓練經(jīng)驗,快速“腦補”完整的行車場景,做到“腦”中有路,“心”中有數(shù)。

行業(yè)數(shù)據(jù)顯示,2024年1月新能源乘用車城市NOA功能的搭載率為10.69%。周光認為,現(xiàn)階段智能駕駛技術尚未跨越早期市場與成熟市場的鴻溝,多數(shù)消費者與機器共駕的默契還有待提升。等到端到端模型上車后,智能駕駛系統(tǒng)會變得更擬人,更便于消費者操作。他相信,端到端模型能快速推動智能駕駛行業(yè)邁向成熟市場,是打造汽車行業(yè)新質生產(chǎn)力的重要引擎。
周光表示:“端到端模型的應用將會顛覆汽車的工具屬性,讓汽車變成一個善于思考、推理的出行機器人。對汽車產(chǎn)業(yè)鏈而言,端到端模型將會改變汽車的盈利模式,提高消費者為智駕系統(tǒng)付費的意愿。未來,元戎啟行將全力推動端到端模型的迭代,加強與主機廠的合作,共同打造更懂消費者的超級AI司機。”
 分享
分享

 京公網(wǎng)安備 11010802028547號
京公網(wǎng)安備 11010802028547號
 購物車
購物車