汽車商業(yè)評(píng)論2024-06-27 16:06

![]()


撰文?/ 曹旭東 (Momenta CEO)
編輯?/ 周 洲
設(shè)計(jì)?/ 師 超
智能駕駛獨(dú)角獸Momenta正在赴美上市的路上。
Momenta已經(jīng)與全球排名前十的汽車集團(tuán)中的一半,展開了量產(chǎn)合作。這些車企客戶有上汽集團(tuán)、通用汽車、豐田、奔馳等,同時(shí)這些主機(jī)廠也是Momenta的投資方。
自2016年成立,Momenta經(jīng)過7輪融資,累計(jì)融資額近13億美元。其資方既包括上述戰(zhàn)略合作車企,有博世這類一級(jí)供應(yīng)商,有互聯(lián)網(wǎng)大廠如騰訊、馬云的云鋒基金、小米系的順為資本,還有知名的投資機(jī)構(gòu)淡馬錫、IDG、GGV紀(jì)源資本。

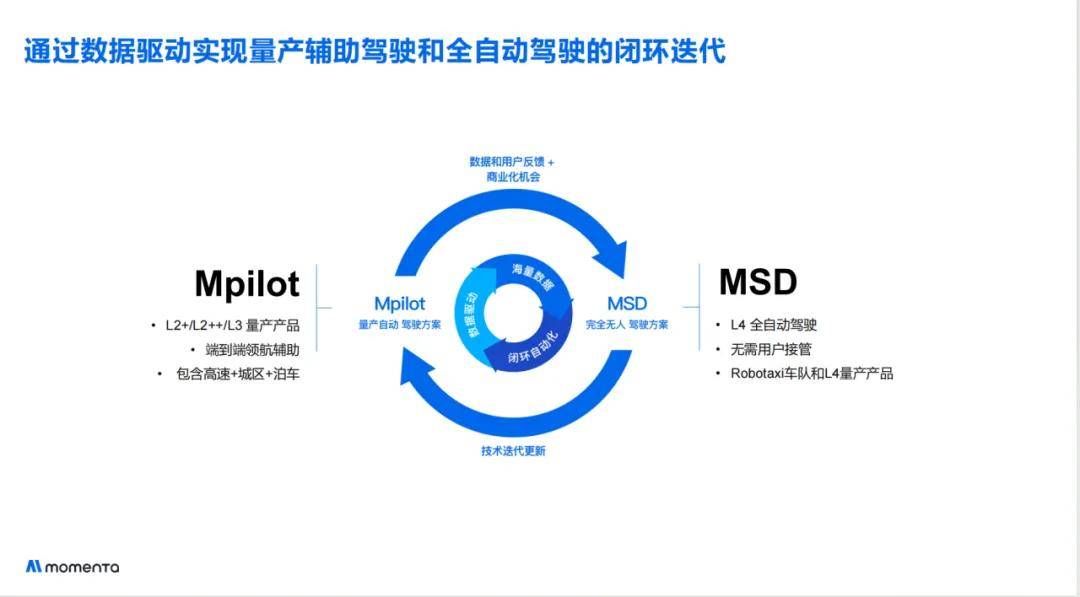
Momenta從創(chuàng)立之初就確立了“一個(gè)飛輪,兩條腿”的戰(zhàn)略。“一個(gè)飛輪”指的是數(shù)據(jù)驅(qū)動(dòng)的AI飛輪,“兩條腿”指的是Mpilot量產(chǎn)自動(dòng)駕駛方案和MSD完全無人駕駛方案,既做智能輔助駕駛,又做Robotaxi。這兩條腿之間產(chǎn)生很好的協(xié)同,量產(chǎn)自動(dòng)駕駛帶來數(shù)據(jù)流,給到完全無人駕駛,而完全無人駕駛反饋技術(shù)流、技術(shù)的更新迭代,給到量產(chǎn)自動(dòng)駕駛,使得量產(chǎn)的產(chǎn)品在市場上更有競爭力,不斷為用戶刷新更好的使用體驗(yàn)。
6月15日下午,在第十六屆中國汽車藍(lán)皮書論壇智能駕駛專場,Momenta CEO曹旭東作了主題為《通往自動(dòng)駕駛的可規(guī)模化路徑》的演講。
他在簡介了Momenta的產(chǎn)品以及一個(gè)“一個(gè)飛輪,兩條腿”的戰(zhàn)略之后,提出了智能駕駛的摩爾定律。
曹旭東認(rèn)為,能夠?qū)崿F(xiàn)城市NOA的高階智能駕駛今年進(jìn)入爆發(fā)期,是因?yàn)橹邱{的摩爾定律。
智駕摩爾定律包含兩部分,一個(gè)是智駕硬件的摩爾定律:同等算力情況下,每兩年硬件成本減半。兩年前實(shí)現(xiàn)城市NOA的BOM(Bill of Material,物料清單)成本是15000-20000元,現(xiàn)在差不多是7000-10000元,2026年大概是4000-5000元,特斯拉FSD的BOM成本已經(jīng)做到4000元了。硬件有極限,整個(gè)BOM實(shí)現(xiàn)4000元出頭之后再往下降就非常難,也不是特別有必要。一個(gè)是智駕軟件的摩爾定律:(每兩年)軟件體驗(yàn)提升十倍。兩年10倍,四年100倍,六年1000倍,智駕的體驗(yàn)會(huì)好到超乎大家的想象。
他覺得未來能夠跟上智駕摩爾定律的公司能夠生存下來,能超越摩爾定律的公司可以成為一家卓越的公司。
以下是曹旭東演講實(shí)錄。
曹旭東:首先非常感謝受邀參加這個(gè)活動(dòng),非常榮幸,非常感謝各位老師和各位領(lǐng)導(dǎo),有機(jī)會(huì)能給大家匯報(bào)一下我們公司的一些思考。
先看一個(gè)視頻,是關(guān)于我們產(chǎn)品的集錦,對(duì)我們公司有一個(gè)直觀的介紹。因?yàn)橐粋€(gè)(智能駕駛)公司的本質(zhì)就是做產(chǎn)品,產(chǎn)品作為載體給用戶創(chuàng)造價(jià)值,(視頻)能看一下我們的產(chǎn)品是什么樣子的,以及給用戶創(chuàng)造什么樣的價(jià)值。這是我們的城市領(lǐng)航,現(xiàn)在可以做到有路就能開,有導(dǎo)航就能開,有高德的導(dǎo)航能開得更好。
可以看到,中國的路況挺復(fù)雜的,既有大城市的大路,也有小城市的小路,非常豐富。我現(xiàn)在出差最大的一個(gè)樂趣就是,去到每一個(gè)城市都(體驗(yàn))有我們(智駕產(chǎn)品)的自動(dòng)駕駛的車,從機(jī)場到(拜訪)客戶,而且專門選那種刁鉆難走的路,非常有意思。
這個(gè)是去年年底的冬測。可以看到在逆光揚(yáng)雪冰雪路面的情況下,AEB也可以剎停,保障用戶的生命安全。我們有一個(gè)非常重要的愿景,就是“十年挽救百萬生命”,現(xiàn)在AEB每周有對(duì)應(yīng)的KPI來跟蹤觸發(fā)的數(shù)量。這里是用戶的一些反饋。(播放視頻)更好的人工智能,更好的生活,希望越來越好的智駕能夠給大家?guī)砀踩⒏残摹⒏玫纳铙w驗(yàn)。
簡要地介紹一下我們公司。我們公司成立到現(xiàn)在有8年時(shí)間,獲得了很多車企的支持,比如上汽、通用汽車、奔馳、豐田等,通過非常好的合作和非常好的交付,我們建立起來了很好的信任關(guān)系,最終(這些車企)也成為我們的戰(zhàn)略投資人。我們公司現(xiàn)在大概有1300人,辦公地點(diǎn)很多,最大的兩個(gè)辦公室主要在北京和蘇州,另外在上海、杭州、廣州、深圳都有辦公室,海外在德國斯圖加特、日本豐田市(Toyota City)、美國桑尼維爾(Sunnyvale,硅谷重鎮(zhèn))都有辦公室。
我們公司很重要的一個(gè)文化是以客戶價(jià)值為中心,只要能跟客戶建立深度的量產(chǎn)合作,我們都會(huì)在客戶旁邊去建辦公室。因?yàn)橹邱{是一個(gè)特別復(fù)雜的系統(tǒng),所以我們?cè)诮ㄞk公室的時(shí)候,尤其是客戶的第一個(gè)平臺(tái)、第一輛車量產(chǎn)的時(shí)候,我們有一個(gè)很重要的原則,就是跟客戶肩并肩作戰(zhàn)、肩并肩辦公,這樣才能及時(shí)溝通、及時(shí)解決(客戶)第一個(gè)平臺(tái)第一臺(tái)車量產(chǎn)過程中的各樣問題,建立起兩個(gè)組織之間合作的信任。
做完我們公司的基礎(chǔ)情況匯報(bào)之后,我來匯報(bào)一下公司的一個(gè)思考:就是怎么能夠?qū)崿F(xiàn)可規(guī)模化的L4。其實(shí)這個(gè)思考不算新東西,公司2016年成立的時(shí)候思考的很多內(nèi)容其實(shí)都在了。我們公司剛成立的時(shí)候就希望能夠?qū)崿F(xiàn)可規(guī)模化的L4。
什么是可規(guī)模化的L4?不是說在某一個(gè)地方、某一個(gè)區(qū)域有畫好的高精度地圖,幾十輛車或者幾百輛車不停地跑啊跑,雖然這有可能叫做L4,但是不是可規(guī)模化的L4。
可規(guī)模化的L4是全國都能開甚至全球都能開,并且能夠達(dá)到人類(司機(jī))的安全水平甚至超過人類(司機(jī))的安全水平——達(dá)到10于倍人類(司機(jī))的安全水平,這個(gè)是我們希望實(shí)現(xiàn)的可規(guī)模化的L4。

可規(guī)模化的L4最關(guān)鍵的就是安全。我們覺得哪怕是乘用車要實(shí)現(xiàn)可規(guī)模化的L4,安全水平也應(yīng)該達(dá)到10倍于人類司機(jī)的安全水平。而如果是做Robotaxi(L4)的話,10倍的安全水平可能還不夠。我們做過計(jì)算,如果Robotaxi在幾個(gè)城市要大規(guī)模商用,至少需要近10萬臺(tái)車,10萬臺(tái)車可能需要100—1000倍人類司機(jī)的安全水平才能達(dá)到足夠的安全性,因?yàn)楦鶕?jù)我們的觀察Robotaxi對(duì)于安全事故的接受度是更低的,大家可以參考最近Cruise Automation(GM旗下無人駕駛車公司)最近的一起事故,就可以看到消費(fèi)者、社會(huì)對(duì)于Robotaxi的安全閾值是非常非常高的。
那怎么達(dá)到這么高的安全性呢?很重要的就是要解決數(shù)百萬個(gè)長尾問題。這數(shù)百萬個(gè)長尾問題是非常具有挑戰(zhàn)性的。舉個(gè)例子,我們有一次路測的時(shí)候剛好遇到了逆行,但逆行的不是一輛車,逆行的是一頭大象。逆行的三輪車中國很常見,逆行的大象在中國路測的時(shí)候也會(huì)遇到,這些都是需要解決的長尾問題,這樣的長尾問題有數(shù)百萬個(gè),那就決定了很難用rule-based(規(guī)則導(dǎo)向)或者是Human-driven(人為驅(qū)動(dòng))的方式去解決問題。
如果是Human-driven的話,你可以用100個(gè)人、1000個(gè)人去解決100、1000個(gè)頭部問題,但是很難用這些人去解決數(shù)百萬個(gè)長尾問題。這就引出了我們第一個(gè)關(guān)鍵的洞察:數(shù)據(jù)驅(qū)動(dòng)的飛輪,用這個(gè)數(shù)據(jù)驅(qū)動(dòng)的飛輪自動(dòng)化地解決數(shù)百萬個(gè)長尾問題。
我們現(xiàn)在的數(shù)據(jù)驅(qū)動(dòng)的飛輪已經(jīng)迭代到第五代了。第一代能夠自動(dòng)化地解決50%的問題,第二代70%,第三代90%,第四代95%,現(xiàn)在第五代超過99%的問題都可以自動(dòng)化地去解決,這樣極大地提升了整個(gè)研發(fā)迭代的效率、解決這些長尾問題的效率。
第二個(gè)關(guān)鍵的洞察是:數(shù)據(jù)驅(qū)動(dòng)的飛輪一定需要數(shù)據(jù),那我們到底需要多少數(shù)據(jù)才能夠?qū)崿F(xiàn)規(guī)模化的L4呢?
我們?cè)?016年公司成立之前就提出了這個(gè)問題。當(dāng)時(shí)我們算了答案之后非常吃驚,也非常驚訝。我們計(jì)算完之后,需要1000億公里的數(shù)據(jù)。1000億公里的數(shù)據(jù),如果是一年跑10萬公里的出租車,大概一年需要100萬臺(tái)車;如果是乘用車的話,大概需要500萬臺(tái)以上跑一年,才有足夠的數(shù)據(jù)去驗(yàn)證這套系統(tǒng)是不是達(dá)到了可規(guī)模化的L4。
當(dāng)然,訓(xùn)練是一個(gè)必要條件,還不是一個(gè)充分條件,充分條件的話有可能這些數(shù)據(jù)就夠了,也有可能需要更多的數(shù)據(jù)才能夠?qū)崿F(xiàn)可規(guī)模化的L4。這就引出了我們公司很重要的一個(gè)戰(zhàn)略叫“一個(gè)飛輪,兩條腿”。
我們根據(jù)前兩個(gè)洞察判斷,如果要實(shí)現(xiàn)可規(guī)模化的L4,第一,整個(gè)軟件算法架構(gòu)、整個(gè)研發(fā)體系必須是一個(gè)數(shù)據(jù)飛輪的驅(qū)動(dòng),才有可能實(shí)現(xiàn)可規(guī)模化的L4;第二,一定得量產(chǎn)。沒有量產(chǎn)不可能有幾百萬臺(tái)車,沒有幾百萬臺(tái)車的話根本沒有辦法實(shí)現(xiàn)規(guī)模化的L4。
基于這兩個(gè)洞察就引出來我們的戰(zhàn)略,其實(shí)非常通俗,叫做“一個(gè)飛輪兩條腿”。其中,一條腿是Mpilot量產(chǎn)自動(dòng)駕駛方案,另外一條腿是MSD——完全無人的駕駛方案,我們的整個(gè)算法是按照MSD的標(biāo)準(zhǔn)和要求設(shè)計(jì)的,之后再應(yīng)用于量產(chǎn)。
這“兩條腿”有很好的協(xié)同。量產(chǎn)自動(dòng)駕駛帶來數(shù)據(jù)流,給到完全無人駕駛,而完全無人駕駛反饋技術(shù)流、技術(shù)的更新迭代,給到量產(chǎn)自動(dòng)駕駛,使得量產(chǎn)的產(chǎn)品在市場上更有競爭力,不斷給用戶刷新更好的使用體驗(yàn)。
介紹完“一個(gè)飛輪兩條腿”的戰(zhàn)略之后,介紹我們的飛輪。
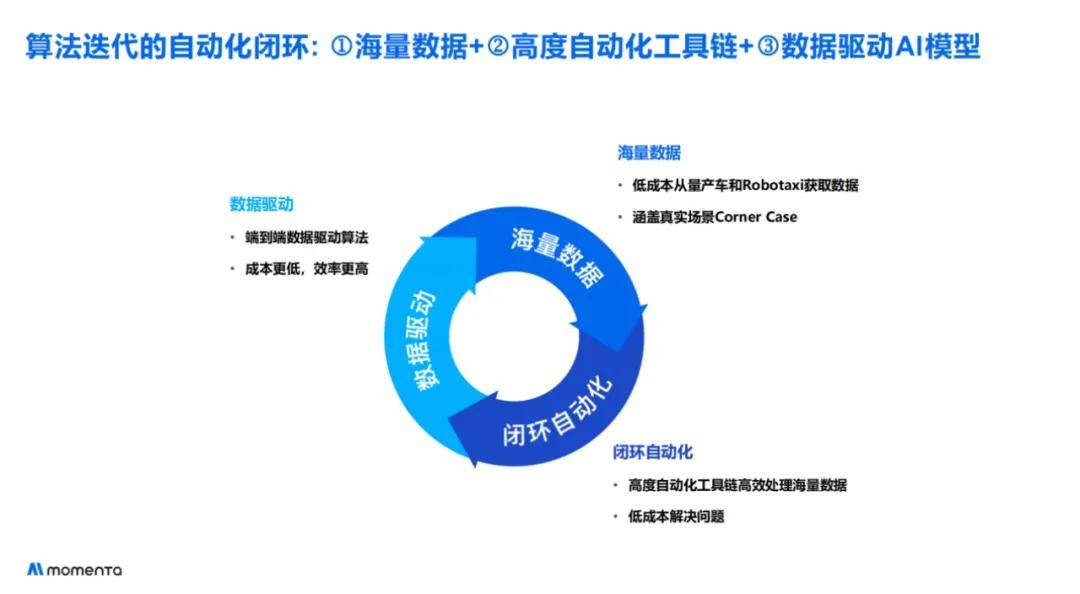
飛輪有三個(gè)因子。第一個(gè)是數(shù)據(jù)驅(qū)動(dòng)的算法,第二個(gè)是海量的數(shù)據(jù),然后是閉環(huán)自動(dòng)化。
我們先介紹一下海量的數(shù)據(jù)。我們現(xiàn)在的數(shù)據(jù)量已經(jīng)比較大了,去年年底大概是5萬臺(tái)車(上)量產(chǎn)的高階智駕,今年年底大概差不多(能覆蓋)30萬臺(tái)車,明年年底大概是100到150萬臺(tái)車會(huì)量產(chǎn)我們的高階智駕,到了2028年的時(shí)候,我們估計(jì)累計(jì)的量應(yīng)該會(huì)超過1000萬臺(tái)。
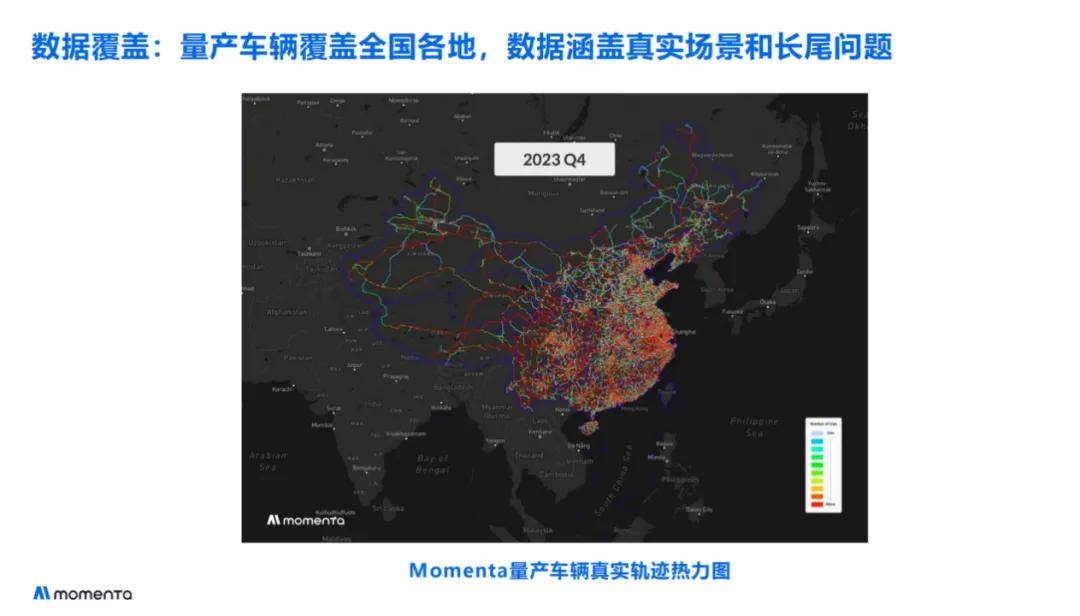
數(shù)據(jù)的增速也是一個(gè)指數(shù)級(jí)的增速,大家可以看一下這個(gè)短小的視頻,這是2022年量產(chǎn)之后,數(shù)據(jù)很快地從一開始只覆蓋經(jīng)濟(jì)發(fā)達(dá)的沿海地區(qū),到覆蓋全國,再到覆蓋全國紅得發(fā)黑(表示數(shù)據(jù)增速極快),其實(shí)就用了大概一年多一點(diǎn)的時(shí)間。相信隨著車的增加,整個(gè)數(shù)據(jù)的增速是非常快的。
有了這些海量數(shù)據(jù),大家會(huì)逐漸發(fā)現(xiàn)一旦大規(guī)模量產(chǎn)之后,稀缺的就不是車或者稀缺的就不是數(shù)據(jù)了。
車和數(shù)據(jù)就有點(diǎn)像沙子或者有點(diǎn)像鐵礦石,真正稀缺的能力是如何把這些礦藏——而且這個(gè)礦藏含礦率可能不是那么高,它可能是貧礦,更像貧瘠的礦產(chǎn),你如何在比例只有千分之一甚至萬分之一的沙子、礦石里面,把這個(gè)鐵提取出來,把鐵提取出來之后再煉成鋼,再把鋼造成發(fā)動(dòng)機(jī),最后再把發(fā)動(dòng)機(jī)裝到車上。這一整套的數(shù)據(jù)閉環(huán)的能力就變得越來越重要、越來越稀缺了。
當(dāng)有了海量的數(shù)據(jù)之后,在我們體系內(nèi)部叫做閉環(huán)自動(dòng)化,在不同的公司有不同的叫法,(有)叫“數(shù)據(jù)閉環(huán)”、“數(shù)據(jù)工廠”等等,這個(gè)能力就變得尤其稀缺、尤其重要,而且非常關(guān)鍵,尤其是整個(gè)自動(dòng)駕駛軟件算法架構(gòu)在逐漸往大模型方向發(fā)展的時(shí)候,這個(gè)基礎(chǔ)設(shè)施的建設(shè)就變得尤其重要。
我們的基礎(chǔ)設(shè)施包含了車端數(shù)據(jù)基礎(chǔ)設(shè)施FDI,還有云端的數(shù)據(jù)基礎(chǔ)設(shè)施CDI,再到自動(dòng)化的數(shù)據(jù)標(biāo)注,再到訓(xùn)練集群。訓(xùn)練集群大概有1萬多張GPU,再到仿真的(里程數(shù))。我們現(xiàn)在每周能夠做的仿真里程數(shù)已經(jīng)接近2000萬公里。另外,我們每月OTA的數(shù)量也很快。
介紹完我們的數(shù)據(jù)和閉環(huán)自動(dòng)化之后,關(guān)于整個(gè)算法架構(gòu)到端到端的大模型,現(xiàn)在整個(gè)AI發(fā)展的趨勢是逐漸由小模型到大模型,由專用的小模型到多個(gè)專用的小模型組合起來去完成任務(wù),變成了一個(gè)更加通用的大模型去完成任務(wù),不管在自然語言(處理)、計(jì)算機(jī)視覺還是在自動(dòng)駕駛,這個(gè)趨勢都在發(fā)生。這里我跟大家也匯報(bào)一下我們?cè)谧詣?dòng)駕駛上的一些實(shí)踐。
我們現(xiàn)在在自動(dòng)駕駛上已經(jīng)做到了算法5.0,在這之前有(算法)2.0、3.0、4.0。
跟大家匯報(bào)三點(diǎn):第一,大家可以看到在(算法)2.0的時(shí)候,尤其是感知的部分,我們有多個(gè)小模型。到3.0的時(shí)候我們把融合、跟蹤和預(yù)測合并成了更大一點(diǎn)的模型,能夠完成更加通用的任務(wù)。到了4.0就進(jìn)一步合并成更大的、更通用的模型。這個(gè)趨勢基本上也是行業(yè)里非常先進(jìn)的一些玩家共同探索的一個(gè)方向。
第二,在規(guī)劃的這部分,我們?cè)谛袠I(yè)里面屬于探索的先頭兵。我們實(shí)際上在2020年的時(shí)候就已經(jīng)開始用Deep Learning(深度學(xué)習(xí))來做planning(規(guī)劃)了,最終把這套東西做到比較成熟能夠量產(chǎn)上車,是在2023年上半年,這個(gè)時(shí)間點(diǎn)甚至比特斯拉用Deep Learning做planning的時(shí)間更早。去年,特斯拉V11的planning還是rule-based planning,但是今年V12已經(jīng)升級(jí)到端到端的Deep Learning的planning。大家可以看到一個(gè)趨勢,在planning的部分,逐漸用深度學(xué)習(xí)去替代傳統(tǒng)的基于規(guī)則的、基于優(yōu)化的planning,這是第二個(gè)趨勢。
第三個(gè)趨勢就是端到端的大模型,這個(gè)詞現(xiàn)在也非常熱。我匯報(bào)一下我們的架構(gòu)設(shè)計(jì),可能跟特斯拉有相同的部分,也有不一樣的部分。
最不一樣的部分是我們的端到端分了兩個(gè)支路。一個(gè)支路是端到端的大模型,類比于人類的長期記憶。另外一個(gè)支路分成了兩階段,DDOD加上DDLD相當(dāng)于是感知的部分,DLP是Deep Learning的planning,是認(rèn)知的部分。這個(gè)支路相當(dāng)于是人類的短期記憶。
為什么一定要構(gòu)建一個(gè)長期記憶、構(gòu)建一個(gè)短期記憶呢?其實(shí)最主要的原因是為了更好的、更低成本的、更短周期的試錯(cuò),因?yàn)橛蒙疃葘W(xué)習(xí)來做自動(dòng)駕駛的話,它是一個(gè)開始,不是一個(gè)結(jié)束。開始的話意味著未來還會(huì)有很多的探索和升級(jí),如何把整個(gè)試錯(cuò)成本降低,這是生物演進(jìn)也需要達(dá)到的一個(gè)效果,那對(duì)于我們來說也需要達(dá)到這個(gè)效果。
埃隆·馬斯克的推特說他去年花了20億美金構(gòu)建他的數(shù)據(jù)中心,今年計(jì)劃用100億美金去做自動(dòng)駕駛的訓(xùn)練和推理。可以看到,自動(dòng)駕駛的大模型訓(xùn)練其實(shí)試錯(cuò)的成本非常高,訓(xùn)練一個(gè)模型可能要花百萬美金甚至幾百萬美金,如果方法錯(cuò)了或者數(shù)據(jù)錯(cuò)了,那幾百萬美金就打了水漂了。
我們的設(shè)計(jì)是短期記憶的訓(xùn)練成本比較低,因?yàn)檎嬲枰剿鞯氖荄LP(Deep Learning的planning)部分。所以在短期記憶上很重要的一件事情就是驗(yàn)證這個(gè)方法是不是正確以及用于訓(xùn)練的數(shù)據(jù)是不是正確,是不是好的方法,是不是好的數(shù)據(jù)。這樣短期記憶的訓(xùn)練成本會(huì)比較低,訓(xùn)練的周期也會(huì)比較短,能夠比較快速地去解決一個(gè)問題、更新一個(gè)feature、驗(yàn)證一個(gè)方法、驗(yàn)證一批數(shù)據(jù)。最終我們被驗(yàn)證過的好的方法、好的數(shù)據(jù),在積累一段時(shí)間之后再應(yīng)用到我們端到端的大模型上(就是長期記憶),這樣能夠保證長期記憶的訓(xùn)練基本上一次訓(xùn)練就能訓(xùn)練對(duì),一次訓(xùn)練就能訓(xùn)練好。這其實(shí)也是跟人的長期記憶、短期記憶很像,人去探索環(huán)境的時(shí)候,最先更新的是短期記憶,當(dāng)這個(gè)短期記憶學(xué)習(xí)到一些成功的經(jīng)驗(yàn)之后,這些成功的經(jīng)驗(yàn)再更新到人的長期記憶中去,這樣就能夠更加低成本、短周期地去適應(yīng)環(huán)境,更加低成本、短周期地去探索更好的方法以及更好的數(shù)據(jù)。這就是我們的端到端大模型整個(gè)算法架構(gòu)的思路。通過這樣一個(gè)做法,比直接完全用端到端的大模型去試錯(cuò),訓(xùn)練的成本應(yīng)該能小10到100倍。
介紹完端到端大模型的算法架構(gòu)和背后的思考,這里有一個(gè)簡短的視頻,來看一下現(xiàn)在能夠取得的效果。(播放視頻)
我們發(fā)現(xiàn)端到端的模型對(duì)于施工道路的變化和非結(jié)構(gòu)化的道路學(xué)習(xí),以及適應(yīng)的能力、泛化的能力都是非常強(qiáng)的。現(xiàn)在我們這套端到端的大模型系統(tǒng)已經(jīng)在一些客戶(的車)上量產(chǎn)了,包括上汽的智己、騰勢,還有昊鉑。時(shí)間有限,看更多的視頻還不如上車體驗(yàn),未來有機(jī)會(huì)希望能夠邀請(qǐng)各位老師、各位領(lǐng)導(dǎo)一起上車體驗(yàn)。
這里我再快速介紹一下一個(gè)思考,就是智駕的摩爾定律以及高階智駕的規(guī)模化。
我們認(rèn)為當(dāng)前是高階智駕的一個(gè)引爆點(diǎn)。去年如果是拐點(diǎn)的話,今年就是引爆點(diǎn)。作為類比,有點(diǎn)像電動(dòng)車的2020年。大家知道2020年到現(xiàn)在2024年,電動(dòng)車的滲透率增速非常快,同樣,能夠?qū)崿F(xiàn)城市NOA的高階智能駕駛也進(jìn)入了爆發(fā)期。
為什么會(huì)有爆發(fā)期?我們認(rèn)為主要因?yàn)槭侵邱{的摩爾定律。
智駕的摩爾定律是我們內(nèi)部的一個(gè)說法,它包含了兩部分,一個(gè)是智駕硬件的摩爾定律,另外一個(gè)是智駕軟件的摩爾定律。
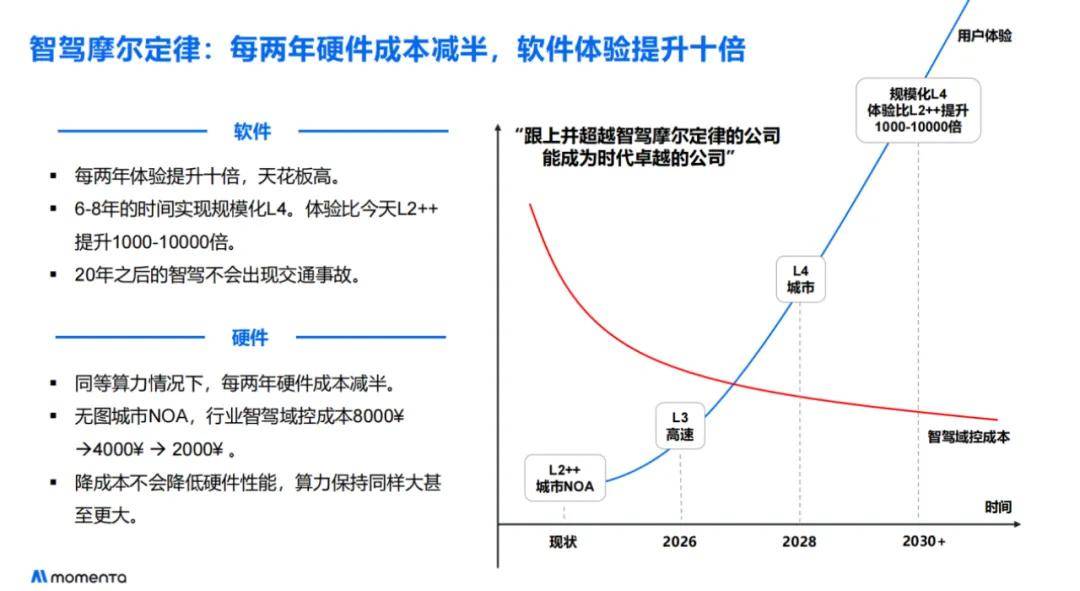
硬件的摩爾定律就是每兩年硬件的成本會(huì)降一半,這是一個(gè)經(jīng)驗(yàn)公式。
比如兩年前能夠?qū)崿F(xiàn)的城市NOA,基本上一套BOM成本,加上域控,加上傳感器,包括攝像頭、激光雷達(dá)等,大概需要15000-20000元。但現(xiàn)在的話,實(shí)現(xiàn)一套城市NOA 的BOM成本差不多能做到7000—10000元,再過兩年到2026年的時(shí)候,能夠?qū)崿F(xiàn)的BOM大概是4000—5000元。
4000—5000元這個(gè)數(shù)字也不是我們瞎想的。大家仔細(xì)去研究一下特斯拉FSD,你會(huì)發(fā)現(xiàn)它的BOM成本已經(jīng)做到4000元了。所以有特斯拉在引領(lǐng)這個(gè)行業(yè),我相信在2026年的時(shí)候整個(gè)行業(yè)能夠?qū)崿F(xiàn)城市NOA智駕的BOM基本上能夠做到4000元出頭。當(dāng)然硬件的摩爾定律是有極限的,整個(gè)BOM做到4000出頭再往下降的話就非常難了,也不是特別有必要了。
另外一個(gè)方面,sky the limited——沒有天花板的就是智駕的軟件摩爾定律。由于大規(guī)模的量產(chǎn)、大模型的上車,由于非常好的數(shù)據(jù)工廠、數(shù)據(jù)閉環(huán)自動(dòng)化的迭代,我們看到的一個(gè)趨勢就是每兩年智駕的水平至少提升10倍。
10倍是什么感受?可以舉一個(gè)例子,最近有一個(gè)客戶來拜訪我們,體驗(yàn)了我們NOA的產(chǎn)品,他說他也試了另外一家非常牛的產(chǎn)品,但是兩年前他開那輛車的話就覺得汗流浹背,兩年后用我們的產(chǎn)品,就覺得有頭等艙的體驗(yàn)。并不是說我們比另外一家做得好,另外一家在過去的兩年應(yīng)該也提升了10倍,如果他再去體驗(yàn)的話也應(yīng)該會(huì)有頭等艙的體驗(yàn),而是說整個(gè)行業(yè)的頭部公司每兩年都能把智駕的體驗(yàn)從兩年前的汗流浹背提升到頭等艙的體驗(yàn)。

可以暢想一下,兩年(智能駕駛體驗(yàn)提升)10倍,四年(提升)100倍,六年(提升)1000倍,如果(經(jīng)過)未來兩年、兩年再兩年,那這個(gè)智駕的體驗(yàn)會(huì)好到超乎大家的想象。
最后簡單總結(jié)一下:我們覺得未來能夠跟上(智駕)摩爾定律的公司能夠生存,能超越摩爾定律的公司能夠成為一家卓越的公司。
希望能夠跟各位老師和各位領(lǐng)導(dǎo)建立起更好的合作關(guān)系,希望能夠一起打造卓越的產(chǎn)品,一起來超越摩爾定律。
好,謝謝大家。
 京公網(wǎng)安備 11010802028547號(hào)
京公網(wǎng)安備 11010802028547號(hào)
 購物車
購物車